This website accompanies the review “Underwater Robotic Simulators Review for Autonomous System Development”, offering a concise summary of findings and a categorized overview of the evaluated literature.
The review evaluates five state-of-the-art, ROS-compatible, open-source underwater robotic simulators (URSs) based on features such as sensor fidelity, environmental realism, and their role in sim-to-real transfer. Each simulator was analyzed across perception, planning, control, and other research domains.
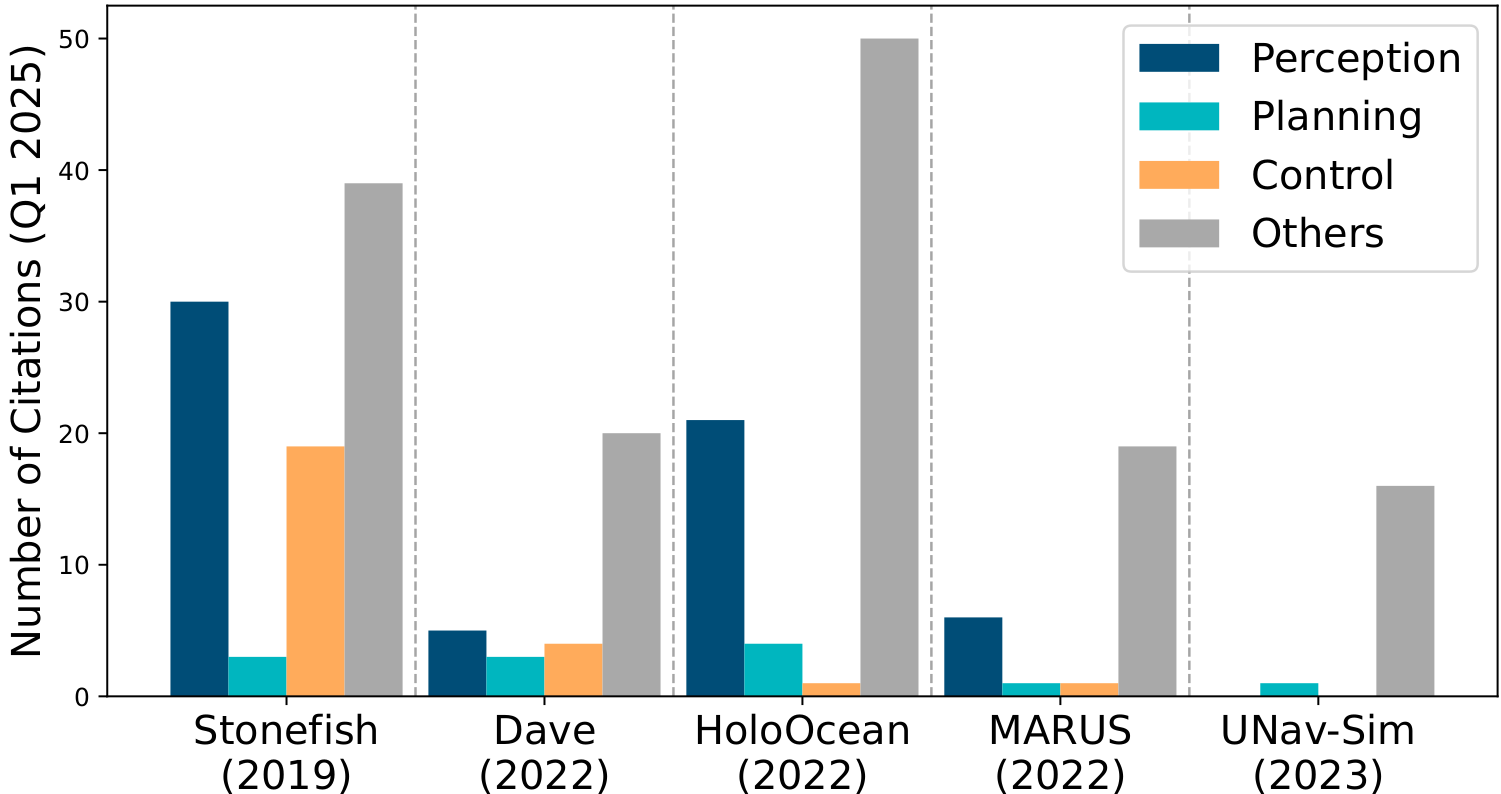
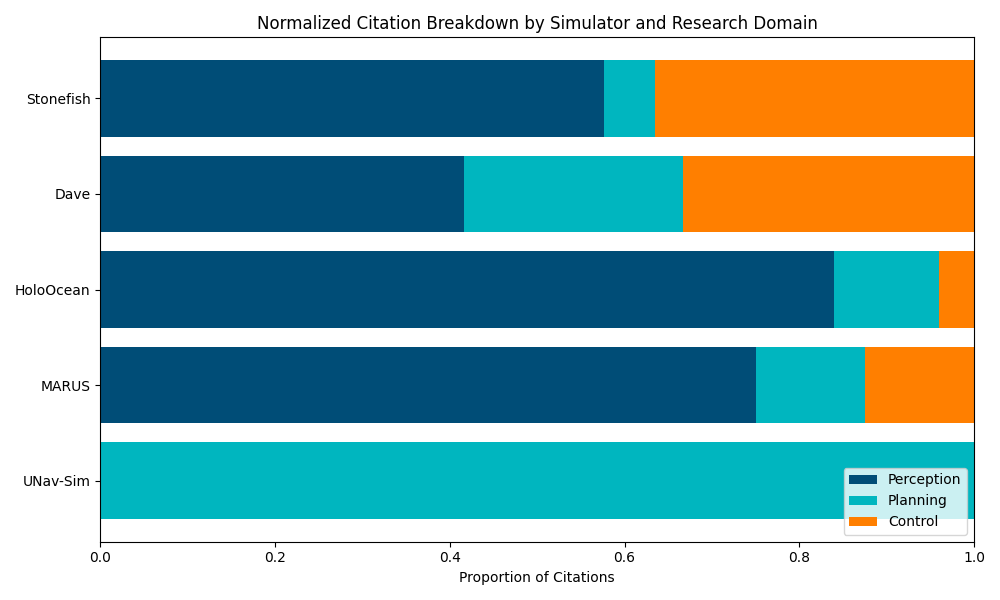
This figure illustrates how frequently each simulator—Stonefish, DAVE, HoloOcean, MARUS, and UNav-Sim—has been utilized across different underwater robotics research domains. The breakdown reveals that perception tasks dominate usage, especially for Stonefish and HoloOcean, reflecting the growing emphasis on sensing and data-driven models. Meanwhile, planning and control studies are also represented, though to a lesser extent, suggesting opportunities for further exploration using these simulators in decision-making and actuation-focused research.
It's notable that newer simulators like UNav-Sim, despite their recent release, are quickly gaining traction, showing the field’s responsiveness to new tools that offer enhanced realism and modern ROS2 compatibility. This trend also supports the case for benchmarking and standardization to unify future research efforts.
@article{aldhaheri2025underwater,
title={Underwater Robotic Simulators Review for Autonomous System Development},
author={Aldhaheri, Sara and Hu, Yang and Xie, Yongchang and Wu, Peng and Kanoulas, Dimitrios and Liu, Yuanchang},
journal={arXiv preprint arXiv:2504.06245},
year={2025}
}